
Criteri di selezione
Definizione tipo di rilevamento
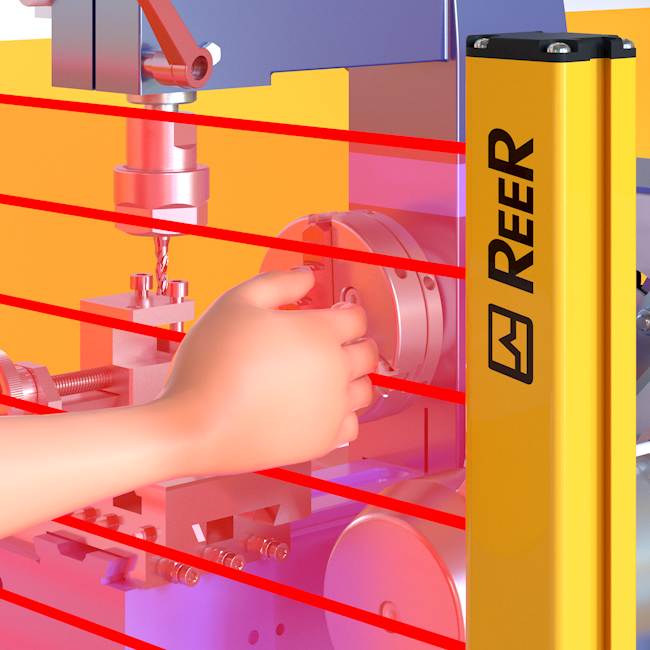

Dita

Mani
Tipo di rilevamento necessario quando l’operatore deve lavorare a breve distanza dal punto pericoloso.
La risoluzione della barriera deve essere tra 14 mm e 40 mm.
Possibilità di ridurre gli ingombri limitando al massimo lo spazio tra protezione e pericolo.
Riduzione tempi di carico e scarico macchina.
Minore affaticamento operatore, maggiore produttività.
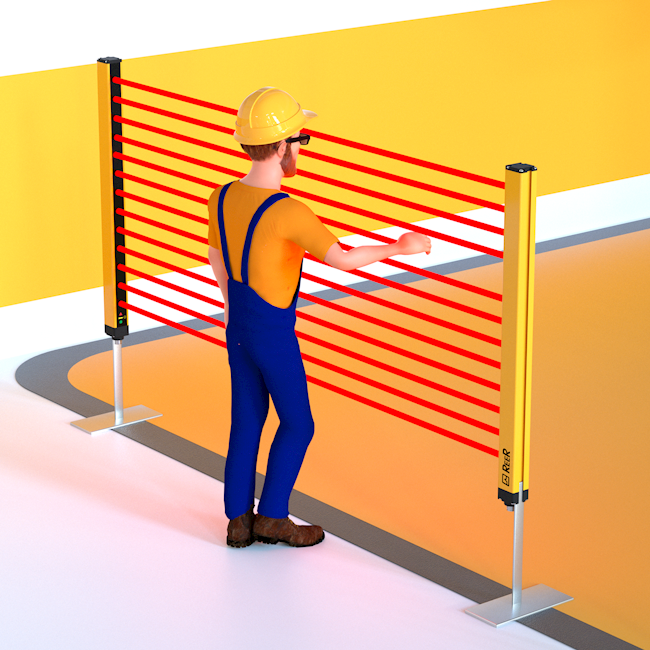

Rilevamento della presenza del corpo nel controllo accessi
Tipo di rilevamento ideale per controllo di accessi e protezioni perimetrali su uno o più lati anche su lunghe distanze.
La barriera deve essere posta ad almeno 850 mm dal pericolo.
Barriera normalmente composta da 2-3-4 raggi.
Costo della protezione molto ridotto grazie ad un numero di raggi limitato.
Possibilità di proteggere aree di grandi dimensioni anche con l’uso di più specchi deviatori.
Vedi nota in basso


Presenza in area a rischio
Tipo di rilevamento realizzato con posizionamento orizzontale della barriera che consente di controllare in modo continuo la presenza di un ostacolo su una determinata area.
La risoluzione della barriera dipende dall’altezza del piano di rilevamento, ma in ogni caso non può superare 116 mm.
Possibilità di controllare zone non visibili dai punti di comando della macchina.
Possibilità di impedire l’avviamento involontario della macchina mentre l’operatore si trova nella zona pericolosa.
NOTA: Non deve essere possibile un avviamento involontario della macchina dopo che una persona, avendo attraversato l’area sensibile, venga a trovarsi – non rilevata – all’interno dell’area pericolosa. Metodi idonei per eliminare questo rischio sono:
Uso della funzione di Start/Restart – interlock con comando posizionato in modo che la zona pericolosa sia visibile e che il comando non sia raggiungibile da chi si trova all’interno della zona pericolosa. Il comando di Restart deve essere controllato in sicurezza.
Uso di un sensore di presenza uomo all’interno dell’area pericolosa.
Uso di ostacoli che impediscano alla persona di rimanere – non rilevata – fra la zona protetta dal sensore e la zona pericolosa.

